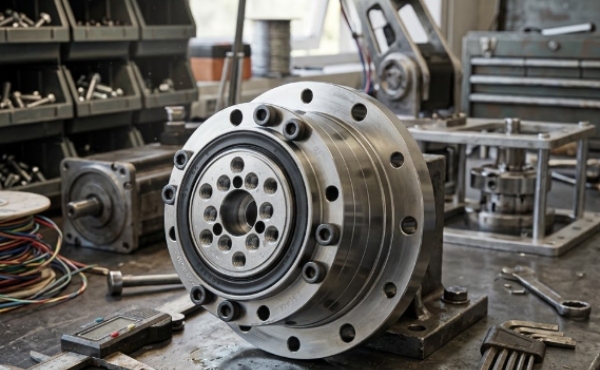
A evolução da robótica avançada – desde robôs colaborativos (cobots) e articuladores industriais até sistemas bípedes humanoides – exige um nível sem precedentes de densidade de potência, rigidez torcional e fidelidade de posicionamento. No centro de cada movimento articulado está o módulo atuador. Para atender a essas rigorosas restrições mecânicas, as arquiteturas de automação modernas exigem uma caixa de engrenagens de motor articulada robótica altamente integrada que unifique a eficiência eletromagnética com redução mecânica de folga zero.
Como pioneiro em soluções industriais de transmissão e controle de movimento, o Grupo iHF projetou um módulo servoatuador integrado de última geração. Ao combinar um motor magnético permanente de torque dentada ultrabaixo com um redutor de engrenagem planetária de alta precisão, o Grupo iHF fornece a base mecânica necessária para sistemas robóticos de próxima geração.
⚙️1. O que é uma caixa de engrenagens de motor conjunto de robô?
Uma caixa de engrenagens de motor de junta robótica é um sistema eletromecânico integrado usado em juntas robóticas para converter a saída de alta velocidade e baixo torque de um motor em movimento de baixa velocidade e alto torque com controlabilidade precisa. Ele normalmente combina um servo ou motor sem escova, uma caixa de engrenagens de precisão (geralmente de redução de engrenagem planetária ou helicoidal) e um sistema de feedback, como um codificador, para obter controle de circuito fechado de torque, velocidade e posição. Isso permite que as juntas robóticas mantenham uma operação estável em baixa velocidade, rápida inversão de direção, alta densidade de torque, baixa vibração e baixo desempenho de ruído. Projetos avançados também otimizam a estrutura do slot do motor para melhorar a eficiência do torque, reduzem o torque de engrenagem para um movimento mais suave e podem incorporar codificadores duplos para maior precisão. Em configurações de ponta, várias unidades podem ser conectadas por meio de comunicação em cadeia para simplificar a transmissão de energia e dados em sistemas robóticos multieixos. No geral, é um componente central que permite movimentos precisos em robôs industriais, robôs colaborativos e sistemas de movimento automatizados.


🔩 2. Arquitetura funcional central da caixa de engrenagens do motor conjunto do robô
Um sistema de caixa de engrenagens com motor de junta robótica integra tecnologia de acionamento de motor com mecanismos de redução de alta precisão, permitindo movimento controlado em juntas robóticas.
Suas funções principais incluem:
● amplificação de torque
● redução e estabilização de velocidade
● controle de posição preciso
● transições direcionais suaves
Isso permite que os robôs executem movimentos complexos com alta repetibilidade e precisão.
🎯 3. Principais vantagens de desempenho
⚡ 3.1 Controle de precisão de baixa velocidade
Um dos requisitos mais críticos da robótica é a operação estável em baixas velocidades. O sistema mantém:
● saída de torque consistente
● precisão de micromovimento
● comportamento rotacional suave
Isso é essencial para tarefas como montagem, soldagem e robótica cirúrgica.
🔄 3.2 Capacidade de reversão rápida de direção
A caixa de velocidades permite uma resposta rápida do motor durante mudanças de direção, melhorando:
● eficiência do tempo de ciclo
● flexibilidade de movimento
● capacidade de resposta dinâmica em braços robóticos
🔁 3.3 Sistema de Controle de Malha Fechada
Uma característica fundamental dos modernos sistemas de juntas robóticas é o controle de feedback em circuito fechado, permitindo:
● controle de torque
● regulação de velocidade
● posicionamento angular preciso
Isso garante que os movimentos robóticos sejam corrigidos continuamente em tempo real para máxima precisão.
🌊 3.4 Operação com baixa vibração e ruído
O projeto estrutural otimizado minimiza a instabilidade mecânica, resultando em:
● amplitude de vibração reduzida
● baixa saída de ruído acústico
● desempenho operacional mais suave
Isto é particularmente importante para robôs colaborativos que trabalham perto de humanos.
🧠 4. Recursos avançados de projeto de engenharia
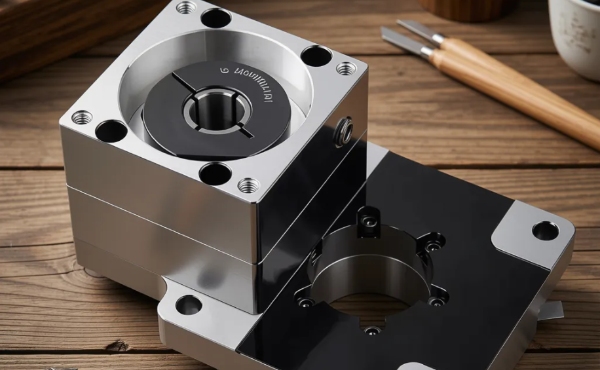
🧩 4.1 Projeto de ranhura do motor de alta densidade de torque
O motor foi projetado com geometria de ranhura otimizada, melhorando:
● eficiência eletromagnética
● saída de densidade de torque
● redução do torque de engrenagem
Isto permite maior desempenho em estruturas articulares robóticas compactas.
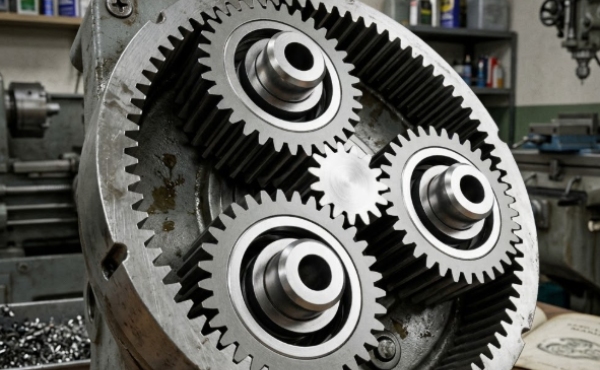
⚙️ 4.2 Redutor de engrenagem planetária de alta precisão
No centro da caixa de engrenagens está um sistema de engrenagens planetárias helicoidais, projetado para:
● alta eficiência de transmissão de carga
● conversão de torque estável
● folga mecânica reduzida
O sistema atinge uma precisão de circularidade da raiz do dente inferior a 3 minutos de arco, garantindo uma precisão posicional excepcional no controle de movimento robótico.
🎛️ 4.3 Sistema de feedback de codificador duplo
Configurações avançadas suportam codificadores duplos, que melhoram significativamente:
● precisão posicional
● resolução de feedback de torque
● redundância e estabilidade do sistema
Isso permite movimentos robóticos ultraprecisos em ambientes de automação de alta tecnologia.
🔗 4.4 Arquitetura de comunicação em cadeia
O sistema suporta configuração em cadeia, permitindo:
● arquitetura de fiação simplificada
● complexidade de instalação reduzida
● transmissão integrada de energia e dados em múltiplas articulações
Isto é especialmente valioso em sistemas robóticos multieixos e plataformas robóticas humanóides.
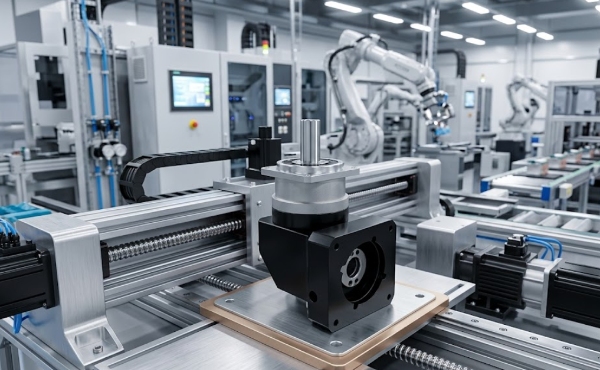
🏭 5. Aplicações industriais de sistemas de caixa de engrenagens de motor conjunto robótico
🤖 Robótica Industrial
Usado em braços robóticos para soldagem, montagem e manuseio de materiais.
🏥 Robótica Médica
Suporta robôs cirúrgicos que exigem precisão de movimento ultra-alta.
🧑🤝🧑 Robôs Colaborativos (Cobots)
Permite uma interação homem-robô segura e suave com baixo ruído e vibração.
🚗 Fabricação automotiva
Usado em linhas de montagem de precisão e sistemas de produção automatizados.
📦 Automação Logística
Suporta sistemas robóticos de classificação, coleta e embalagem.

🏗️ 6. Importância de engenharia da seleção da caixa de engrenagens
Selecionar a caixa de engrenagens do motor articulada correta é fundamental porque influencia diretamente:
● precisão de movimento
● capacidade de carga
● estabilidade do sistema
● vida útil
● eficiência energética
O projeto inadequado da caixa de engrenagens pode resultar em:
● erros de folga
● superaquecimento
● instabilidade vibratória
● precisão robótica reduzida
🏢 7. Inovação de Engenharia do Grupo iHF em Sistemas de Movimento Robótico
Como fabricante especializado de sistemas de movimento e transmissão, o Grupo iHF desenvolve soluções de alto desempenho para caixas de engrenagens com motores articulados para robôs, projetadas para a robótica moderna.
Sua abordagem de engenharia se concentra em:
● projeto de engrenagem planetária de alta eficiência
● integração de motor de precisão
● relação torque/tamanho otimizada
● arquitetura mecânica de baixo ruído
● compatibilidade de controle de feedback avançado
Em vez de oferecer componentes mecânicos genéricos, o Grupo iHF enfatiza a otimização de movimento em nível de sistema, garantindo integração perfeita em plataformas robóticas avançadas.
🚀 8. Tendências futuras em tecnologia de caixa de engrenagens de motor de articulação robótica
A indústria robótica está evoluindo rapidamente, impulsionando a inovação em sistemas de caixas de velocidades:
● Compensação de movimento orientada por IA
● miniaturização com maior densidade de torque
● sistemas de engrenagens com folga ultrabaixa
● atuadores inteligentes totalmente integrados
● maior eficiência energética para robôs humanóides
Essas tendências definirão a próxima geração de sistemas inteligentes de movimento robótico.
🧾 9. Perguntas frequentes: Caixa de engrenagens do motor da junta do robô
❓ O que diferencia uma caixa de engrenagens com motor articulado de robô de uma caixa de engrenagens padrão?
Ele integra controle do motor e redução de precisão em um único sistema otimizado para precisão de movimento robótico.
❓ Por que a baixa vibração é importante na robótica?
A baixa vibração garante maior precisão, movimentos mais suaves e maior segurança na interação homem-robô.
❓ Qual é o papel de uma caixa de engrenagens planetárias na robótica?
Ele fornece alta densidade de torque, estrutura compacta e transmissão de movimento estável para juntas robóticas.
❓ Por que usar codificadores duplos em juntas robóticas?
Os codificadores duplos melhoram a precisão do feedback, a redundância e a estabilidade do controle de movimento em circuito fechado.
❓ Quais indústrias se beneficiam mais com esses sistemas?
Automação industrial, robótica médica, sistemas logísticos, fabricação automotiva e robótica colaborativa.
🧾 Conclusão: o movimento preciso define o futuro da robótica
A caixa de engrenagens do motor articulado do robô é um componente fundamental da robótica moderna, permitindo controle de movimento preciso, estável e inteligente em diversas aplicações.
Com recursos avançados de engenharia, como controle de circuito fechado, feedback de codificador duplo, precisão de engrenagem planetária e operação com baixa vibração, esses sistemas são essenciais para o desempenho robótico da próxima geração.
Através da inovação contínua, o Grupo iHF oferece soluções de movimento de alta precisão que capacitam os fabricantes de robótica a alcançar maior eficiência, precisão e confiabilidade do sistema em ambientes de automação cada vez mais complexos.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Solicitar orçamento
Solicitar orçamento