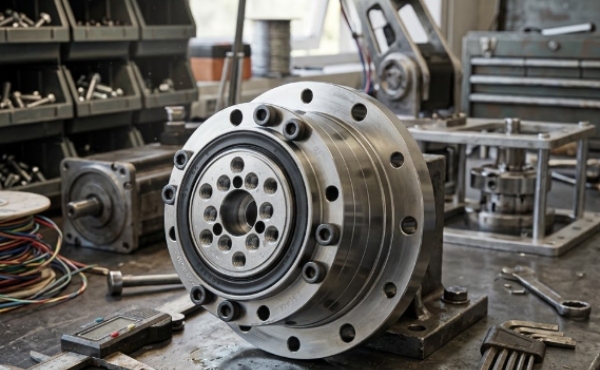
O impulso global em direção à automação industrial avançada, robôs colaborativos de alta carga útil (cobots), braços médicos cirúrgicos e sistemas de defesa multieixos impõem demandas extremas aos atuadores eletromecânicos. Os servomotores embalados tradicionais geralmente adicionam muito volume, excesso de peso e conformidade mecânica aos projetos de juntas. Para obter movimentos fluidos e de alto torque em espaços restritos, os engenheiros de projeto modernos estão recorrendo a motores de junta de torque integrados e sem moldura .
Ao incorporar o estator e o rotor diretamente na carcaça estrutural da máquina, esses kits integrados eliminam eixos, rolamentos e acoplamentos desnecessários. Contudo, alcançar a verdadeira precisão em juntas compactas requer muito mais do que apenas integração básica; exige ajuste magnético avançado, mecânica de feedback precisa e conectividade de sistema simplificada.

💡 Design magnético avançado: maximizando a densidade de torque enquanto atenua o desgaste
No controle de movimento de precisão, o desempenho de um motor é frequentemente limitado por seus limites térmicos e pelo atrito magnético inerente. Os motores sem moldura padrão freqüentemente sofrem com torque severo – tração magnética periódica entre os ímãs do rotor e as ranhuras do estator – o que degrada a precisão do posicionamento em velocidades lentas.
Para resolver essas limitações, as juntas robóticas de última geração implementam um design otimizado de ranhura de motor. Calculando a inclinação geométrica precisa das ranhuras do estator ou mudando o layout do ímã permanente no rotor, os engenheiros podem reduzir significativamente os efeitos de denteamento. Este design produz uma densidade de torque notavelmente alta, garantindo a saída máxima de torque por unidade de volume, mantendo uma rotação suave.
● Excelência no controle em baixa velocidade: Graças a esta arquitetura magnética otimizada, o sistema mantém um controle preciso em baixas velocidades. Ele elimina os problemas de aderência e deslizamento comuns em configurações de acionamento direto de baixo custo, o que é crucial para soldagem de alta precisão, micromontagem e aplicações cirúrgicas delicadas.
● Baixa Vibração e Operação Silenciosa:Este ajuste estrutural garante uma resposta rápida, operação estável, baixa vibração e baixo ruído. A eliminação da ressonância acústica de alta frequência é particularmente vital para salas cirúrgicas médicas e espaços de trabalho colaborativos em salas limpas.
🛠️ Cinemática Mecânica: Integrando Redutores Planetários de Alta Precisão
Um kit de motor sem moldura fornece torque eletromagnético bruto, mas converter essa potência em articulação robótica utilizável requer um sistema de redução de velocidade de alto desempenho. A integração de um redutor de engrenagem planetária de alta precisão com perfis de engrenagens helicoidais avançados fornece uma solução altamente compacta e robusta.
Calibração de folga ultrabaixa: As caixas de câmbio comerciais padrão apresentam folga significativa, o que prejudica a repetibilidade da posição. As juntas integradas premium apresentam um arredondamento da raiz do dente de menos de 3 minutos de arco. Esta tolerância geométrica rigorosa garante excelente rigidez torcional e minimiza a perda de movimento durante ciclos bidirecionais.
Rápida inversão direcional: A baixa inércia do rotor sem moldura, combinada com o ajuste preciso das engrenagens planetárias helicoidais, permite a rápida inversão de direção do motor. O atuador pode girar instantaneamente sob alta carga sem introduzir choques mecânicos ou forçar o sistema de transmissão.


🏢 Inteligência de circuito fechado: o padrão de atuação do grupo iHF
Para construtores de robôs industriais e integradores de sistemas de automação, a montagem separada de estatores, rotores, engrenagens de ondas de deformação e codificadores de diferentes fornecedores representa um gargalo de fabricação frustrante. As incompatibilidades entre os componentes geralmente levam a atrasos de sinal, problemas de expansão térmica e procedimentos de calibração complexos.
Para resolver estes desafios da indústria, o Grupo iHF desenvolveu uma solução de junta modular totalmente integrada e de alto desempenho. Ao combinar a tecnologia de acionamento direto de precisão com hardware de feedback avançado, os sistemas do Grupo iHF oferecem desempenho de acionamento direto incomparável, pronto para uso.
⚙️ Verdadeiro controle de malha fechada multivariável: os controladores do Grupo iHF alcançam controle de malha fechada completo e determinístico de torque, velocidade e posição. Algoritmos avançados de controle orientado a campo (FOC) processam perfis atuais em tempo real, evitando erros de rastreamento mesmo durante movimentos altamente dinâmicos.
📊 Arquitetura de feedback de codificador duplo: Para eliminar os erros de posicionamento causados pela deflexão física da engrenagem sob cargas pesadas, o sistema suporta codificadores duplos para melhorar ainda mais a precisão do controle de feedback. Um encoder incremental ou absoluto de alta resolução monitora o eixo do motor de alta velocidade, enquanto um encoder absoluto secundário monitora diretamente a junta de saída de baixa velocidade. Esta configuração mede e corrige continuamente pequenas microdeflexões em tempo real.


🔌 Simplificando a topografia do sistema: arquitetura Daisy-Chain
À medida que os sistemas robóticos adicionam mais eixos – como cobots de 7 eixos ou estruturas humanóides complexas – o gerenciamento da fiação interna torna-se altamente complexo. A passagem de cabos de alimentação e feedback dedicados de um gabinete de controle central através de cada junta resulta em feixes de cabos grossos que restringem o movimento da junta e aumentam os riscos de falha devido à torção contínua.
As juntas modernas de alta densidade superam isso incorporando um layout de comunicação serial que economiza espaço. O sistema suporta configuração em cadeia para múltiplas unidades, facilitando o fornecimento de energia e a transmissão de dados. Ao incorporar um microdrive localizado dentro de cada junta, um único barramento de alimentação CC compartilhado e um cabo Ethernet industrial de alta velocidade (como EtherCAT ou CANopen) podem ser roteados sequencialmente de uma junta para a próxima. Isto reduz drasticamente o peso total do cabo, simplifica o roteamento físico e aumenta a confiabilidade geral do sistema.
❓ Aprofundamento técnico: perguntas e respostas do setor
P1: Como uma configuração de codificador duplo protege contra desgaste mecânico ao longo do tempo?
R: Em um sistema de codificador único, se as engrenagens planetárias sofrerem um pequeno desgaste ou folga ao longo dos anos de serviço, o controlador permanecerá inconsciente do erro físico no flange de saída. Ao utilizar o suporte de codificador duplo fornecido pelo Grupo iHF, o codificador secundário monitora diretamente a posição real da ferramenta. Mesmo que ocorra desgaste mecânico dentro do redutor, o sistema de circuito fechado compensa automaticamente a variação, garantindo que seu robô mantenha uma precisão submilimétrica durante toda sua vida operacional.
Q2: Por que as engrenagens helicoidais são preferidas às engrenagens de dentes retos em aplicações de juntas de alto torque?
R: As engrenagens helicoidais apresentam linhas de dentes angulares que engatam gradualmente, em vez de todas de uma vez. Este contato dentário progressivo aumenta significativamente a taxa de contato total, distribuindo altas cargas mecânicas por vários dentes. Este layout permite diretamente um arredondamento da raiz do dente de menos de 3 minutos de arco, reduz o ruído acústico e fornece a resistência de torção superior necessária para picos repentinos de torque.

 EN
EN en
en vi
vi it
it es
es th
th tr
tr ja
ja pt
pt ko
ko ru
ru fr
fr de
de ar
ar Solicitar orçamento
Solicitar orçamento